
Die Architektur des CulinAIBot ist sowohl in der Hardware als auch der Software modular aufgebaut.
Der CulinAIBot besteht für den BWKI aus den Modulen “Zentrale Einheit“, zwei “Roboterarme“, einer “Mobilen Einheit” und einer “Höhen Einheit“. Diese modulare Architektur in Anschlussprojekten in einzelnen Modulen erweitert und verbessert werden.
Die Architektur und die Technische Umsetzung für das BWKI Projekt CulinAIBot ist im folgenden Bild dargestellt und wird in den Abschnitten 2.1.1. Hardware und 2.1.2 Software ausführlicher erklärt.
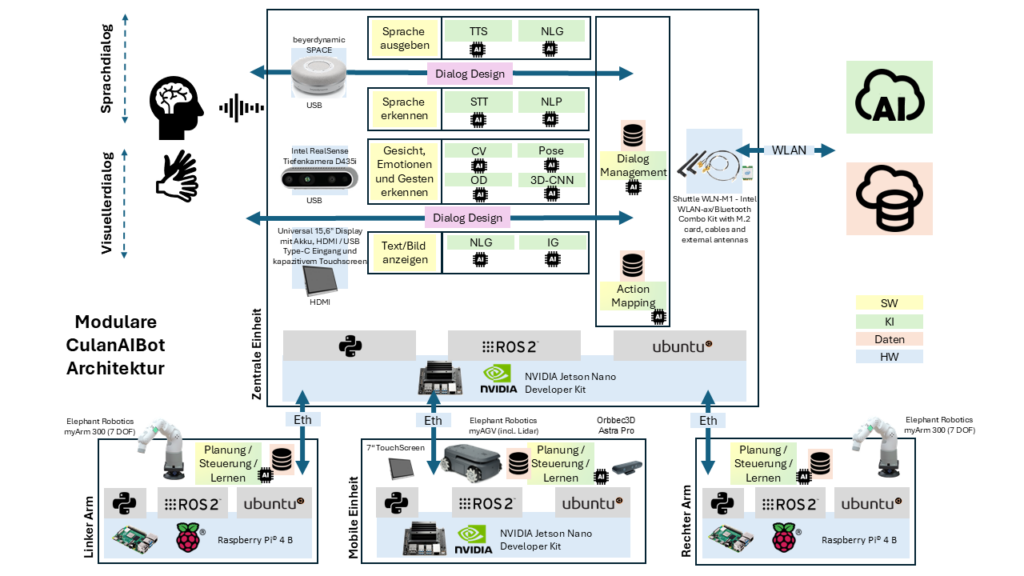
Bild: Modulare Architektur des CulinAIBot
Die “Zentrale Einheit” bildet das Zentrum sind die genannten Einheiten und Peripherie wie Lautsprecher, Mikrophon, Kamera und Bildschirm angeschlossen. Sie verfügt auch über die Datenkommunikations-schnittstelle (WLAN) ins Internet.
Die Komponenten der einzelnen Einheiten setzen sich aus Standardprodukten zusammen. Der Auswahl der Komponenten ging jeweils eine Marktrecherche mittels Internetsuche voraus.
Für den BWKI habe ich mich auf die rot eingerahmten Anteile der Künstlichen Intelligenz fokussiert. Mehr dazu in den folgenden Abschnitten.
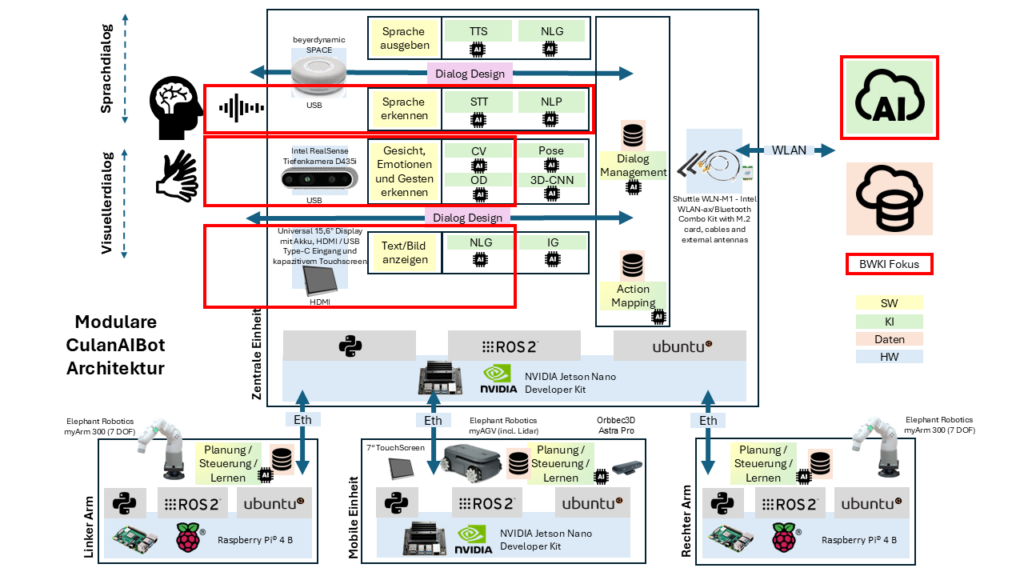
Bild: Fokus in der BWKI Abgabe